ORI - Oxford Indoor Human Motion Dataset
Oxford Indoor Human Motion Dataset
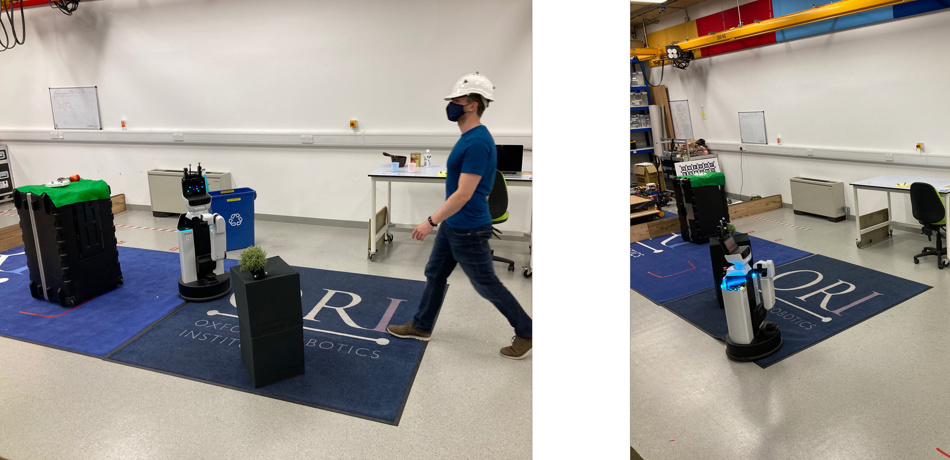
We present The Oxford Indoor Human Motion (Oxford-IHM) Dataset – a human trajectory prediction dataset in which humans walk between regions of interest in an indoor environment. We use static and robot-mounted RGB-D cameras to observe humans as they move between goals while being tracked within a motion-capture setup.
Overview
- ~60 minutes of rosbag data
- Motion-capture tracked goal-oriented human behaviour
- High precision, sub-millimetre average residual tracking, position data for sensors and obstacles, recorded with a motion capture system at 100 Hz
- 2D environment maps generated using a laser range sensor
- RGB-D streaming on both static and moving, robot-perspective cameras
Download
Click here to access to the dataset
Citation
To use the Oxford-IHM dataset, please cite:
Motion Planning in Dynamic Environments Using Human Trajectory Prediction
Mark Nicholas Finean, Luka Petrović, Wolfgang Merkt, Ivan Marković, and Ioannis Havoutis [Paper] [Video]
Contact Us
For any enquiries or feedback about the dataset, please email us at oxford-ihm-dataset@robots.ox.ac.uk
Authors
The following members of Dynamic Robot Systems Group at Oxford Robotics Institute contributed to this dataset: Mark Finean, Wolfgang Merkt and Ioannis Havoutis.
This dataset was the result of collaboration with the following members of the Laboratory for Autonomous Systems and Mobile Robotics, University of Zagreb, Croatia: Luka Petrović and Ivan Marković.
Updates
2022 Jan: Initial release.