Oxford Robotics Institute | Projects - AutoInspect
AutoInspect
AutoInspect is a mature, well-tested end-to-end autonomy system for mobile and legged robot industrial inspection
Autonomous inspection of hazardous or difficult to access facilities has become a practical application for mobile robots. There is a growing demand for robust solutions that have been tested in realistic facilities. For technical details, see our paper "AutoInspect: Toward Long-Term Autonomous Inspection and Monitoring" in IEEE Transactions on Field Robotics.
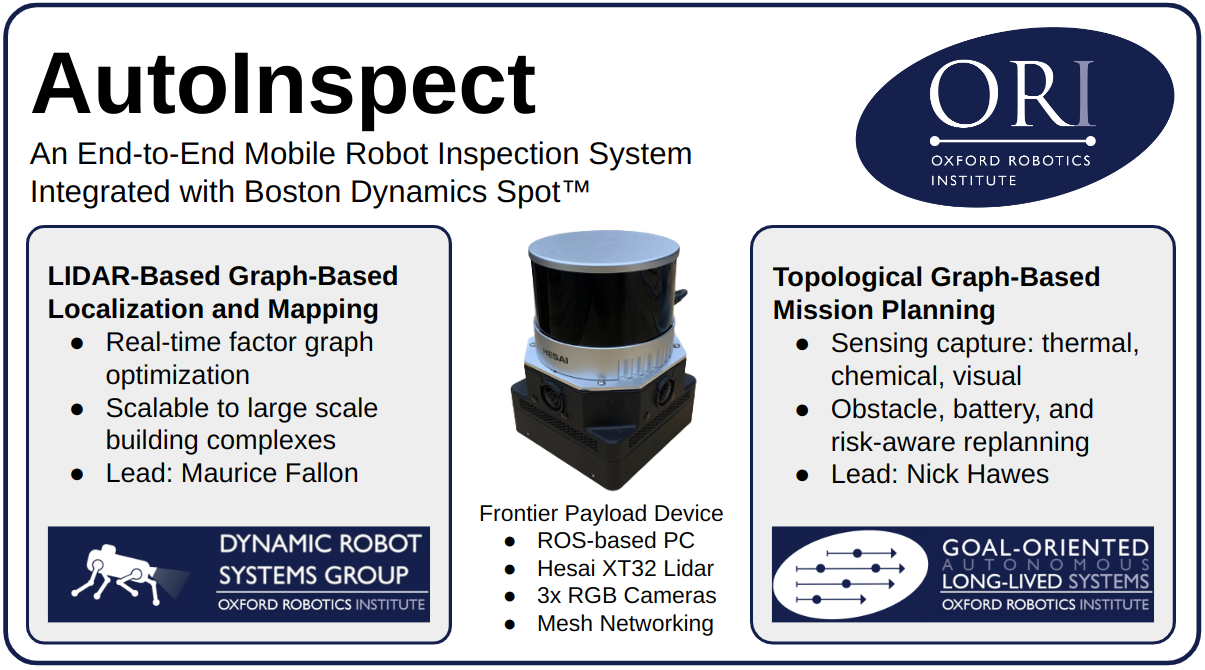
AutoInspect combines technology from two ORI research groups: the Dynamics Robot Systems (DRS) Group and Goal-Oriented Long-Lived Systems (GOALS) Lab. AutoInspect can be deployed in a matter of hours and has three main components:
- Localisation and Mapping: A full solution for graph-based LIDAR simultaneous localisation and mapping (SLAM) as well as the capability to localize in existing maps based on our VILENS mapping engine. This allows robots such as Spot to build up a navigational map in the time needed to walk a facility.
- Mission Planning: Given the navigational map, we build a topological mission graph which can be annotated with features of interest such as inspection points for chemical, thermal or visual sample taking. The mission planner includes advanced features such as battery-power aware mission planning and automatic blocked passageway re-routing.
- Frontier Payload: The Frontier device (7th generation) combines an NUC PC (i7 generation), Hesai XT32 lidar, 3x synchronized fisheye cameras and a mesh networking solution to deliver AutoInspect onto the mobile robot - with particular integration expertise for the Boston Dynamics Spot. Our past experience deploying AutoInspect in nuclear facilities, oil and gas plants and construction sites give confidence of reliability to all manner of communication, dynamics and sensor challenges.
Key deployments in 2021 and 2022 include:
- Autumn 2021: The mapping payload was used to reconstruct several buildings in Chernobyl as part of a field mission led by University of Bristol and Prof. Tom Scott. Watch the video.
- Spring 2022: Full deployment on a live Chevron facility in Ghent, Belgium. This was the first legged robot deployment by Chevron in Europe. Read the full report here.
- Spring 2022: Autonomous deployment at Sellafield's Calder Hall facility. This was the first autonomous robot inspection demonstration on the Sellafield site. Related video from Createc.
- Autumn 2022: Deployment on Costain's Gatwick Train Station facility. We demonstrated mapping followed by autonomous inspection in 4 hours. The robot captured accurate reconstructions which could be used to measure construction progress over time. Watch the video here
For further information please contact:
- Prof. Maurice Fallon (DRS) mfallon@robots.ox.ac.uk
- Prof. Nick Hawes (GOALS) nickh@robots.ox.ac.uk
This capability was developed in projects funded by UKRI (EPSRC & Innovate UK): Offshore Robotics for Certification of Assets (ORCA) Hub, Robotics and AI for Nuclear (RAIN) Hub, AutoInspect (with Createc Limited).
Code for the graph-based autonomy system can be made available to academic users. Please direct inquires to Prof. Nick Hawes (nickh@robots.ox.ac.uk). For non-academic purposes, licensing is managed by Oxford University Innovation. Please use the contact form at https://innovation.ox.ac.uk/about/contact-us/ and indicate project number 22570.