11 Jun 2026
CASE STUDY: Autonomous piloting of gliders for ocean monitoring
The growing use of underwater gliders in marine science, combined with the need for large-scale ocean monitoring, has led to an interdisciplinary problem: developing an autonomous system for piloting underwater gliders

To understand our changing planet, scientists need regular measurements from the ocean. Data on temperature, salinity, oxygen levels, and marine ecosystems feed into international observing programmes such as the Global Ocean Observing System (GOOS), helping improve weather forecasts, climate models, and environmental monitoring. Collecting this data is difficult because the ocean is vast, constantly changing, and difficult to monitor across large distances.
Autonomous Underwater Vehicles (AUVs), such as underwater gliders, are widely used to collect scientific data about the oceans. They are already helping scientists and decision-makers better understand the ocean and support the sustainable management of marine resources. AUVs are expected to play a pivotal role over the coming decade by increasing the quantity and quality of ocean measurements.
The rise in the use of such AUVs brings challenges regarding their operation and management. These challenges were tackled by researchers at the Oxford Robotics Institute (ORI) in partnership with the National Oceanography Centre (NOC).
Background on glider operations
Gliders are marine robots that use a highly energy-efficient passive propulsion system. They are able to operate autonomously for months at a time and are much less carbon-intensive than traditional ship missions.
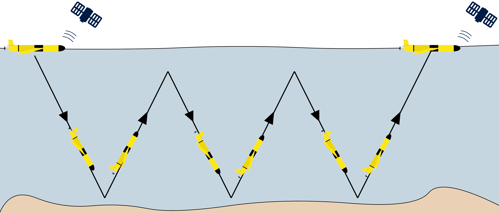
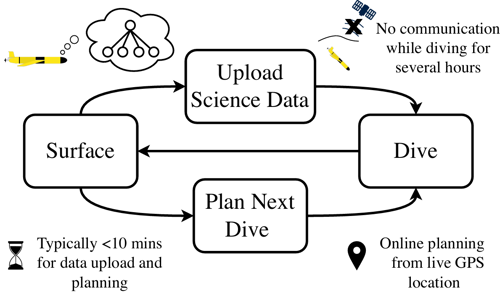
Gliders are typically piloted manually: they surface every few hours with pilots reviewing weather conditions, progress of the last dive, and mission objectives to determine the next instructions. If pilots are not available (for example during the nighttime or outside normal working hours), the glider will follow its most recent instructions for the next dive.
The flipside of gliders’ energy efficiency is that they move slowly (at about 1km/h) and are highly influenced by ocean currents. If instructions are outdated, the glider may not be on the best path for the next sampling task.
Furthermore, as gliders are deployed in greater numbers, there is a growing need to make their operation more efficient. Instead of relying on human pilots to exhaustively check each robot and decide its next steps, future fleets will need to make many routine decisions automatically. This will free up the time of pilots to focus on more challenging scenarios that require their attention.
Towards online planning systems embracing uncertainty
The Goal-Oriented Long-Lived Systems (GOALS) group at the ORI has developed an algorithm that performs online planning each time the glider surfaces. Specifically, it allows the instructions for the next dive to be determined based on the current location transmitted by the glider and the forecasted weather conditions, instead of relying on brittle pre-programmed paths.
The problem was approached using a set of artificial intelligence techniques for planning under uncertainty. Concretely, the team formulated the problem as a Markov Decision Process and solved it using a Monte Carlo Tree Search planner. The simulator created by the team, which relies on ocean current forecasts, predicts the range of locations where the glider is likely to resurface while accounting for uncertainty.
This creates a virtuous feedback cycle between the ocean measurement capability, glider navigation planning, and data assimilation for improving weather forecasts
The system operates in near-real time, making decisions every few hours, which builds up to months of fully autonomous operation. This creates a virtuous feedback cycle between the ocean measurement capability, glider navigation planning, and data assimilation for improving weather forecasts.
Scaling fully autonomous underwater glider piloting
The project resulted in two field trials in the North Sea. In the first, underwater gliders were deployed to collect ocean measurements for the UK Met Office towards improved weather forecasting. The system was also deployed in a project led by the University of East Anglia seeking to measure the impact of offshore wind farms on their local marine environment.

To date, the field trials have totalled over three months and 1,000km, representing the most extensive real-world validation of fully autonomous glider navigation planning. Collaborations with the National Oceanography Centre and the UK Met Office continue. The next steps will focus on improving the algorithm and expanding the system to support larger fleets of gliders, making long-term ocean monitoring easier to manage.



