01 Sep 2025
CASE STUDY: Exploring hazardous environments with mobile robots
Using robots to carry out tasks in hazardous environments keeps humans away from danger, but usually still requires human oversight. This ORI project enables a robot to explore a hazardous environment entirely autonomously.

SafeEstMDP, integrated on a Spot robot platform, explores a hazardous subterranean area
Goal-Oriented Long-Lived Systems (GOALS)
Some hazards, such as radiation, can damage or disable mobile robots. Even if not physically damaged, the robot itself can become radioactive, endangering its operators and stopping it from being used again. Enabling a robot to act autonomously in such environments is therefore crucial for keeping humans away from hazards, and ensuring a successful mission. We focus on an exploration task where the robot must build a 3D, video-game-like map of the environment. While doing this, it must avoid hazards that could damage it. This includes making sure it can always safely return to its starting location. Additionally, the robot should try to explore quickly and efficiently.
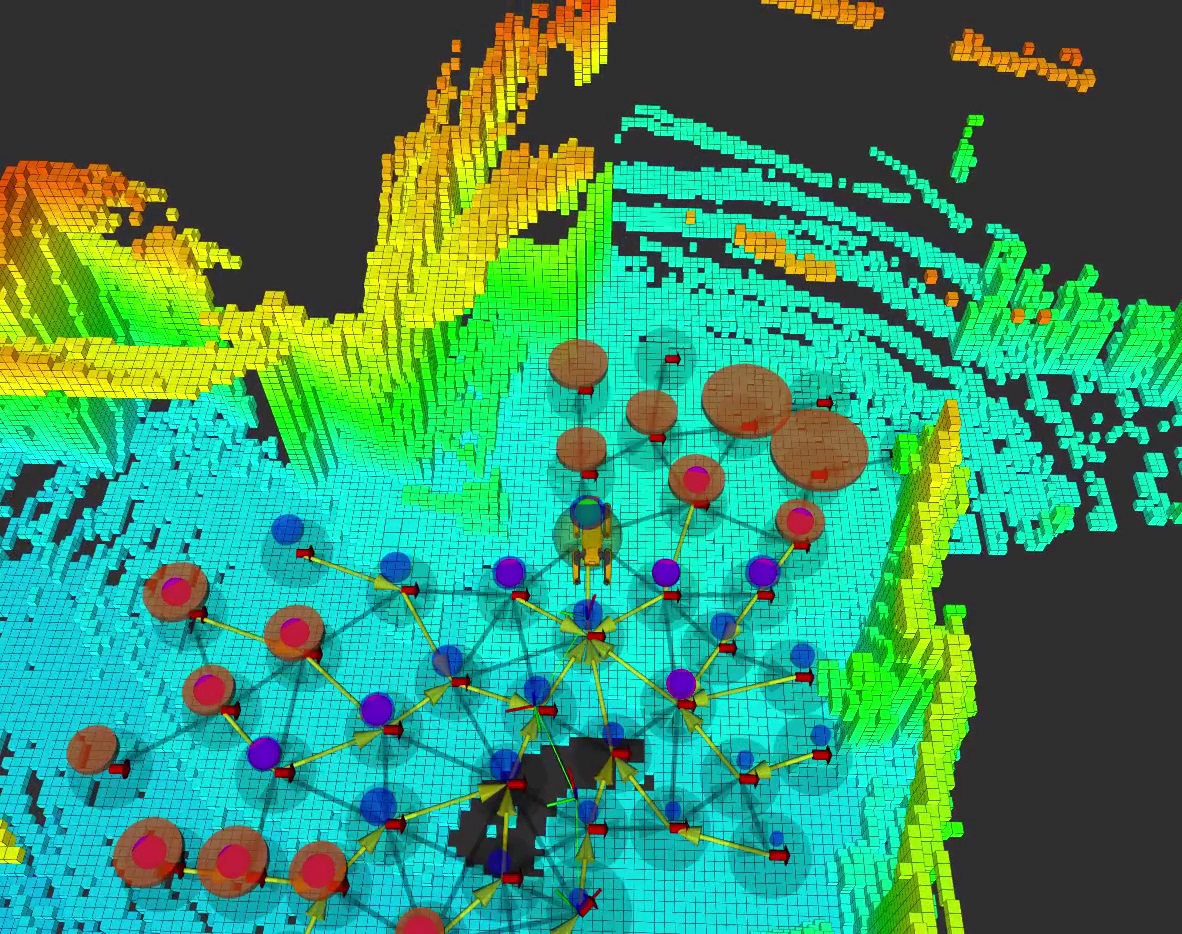
The algorithm, SafeEstMDP, is safer and faster at exploring than existing methods. It explores by learning the distribution of hazards in the environment and carefully choosing new locations to visit and measure. The robot can then trade off the estimated safety of paths through the environment with the amount of new map information it can gain from them. This type of exploration algorithm has previously not been demonstrated on a real robotic system.

3D map construction and localisation was carried out with the well-proven VILENS system, running on the Frontier payload. The trial highlighted integration of the safe exploration algorithm and mission planning systems from the GOALS lab with the localisation and mapping work of the DRS lab, and was made possible by robot platform and field trial support from the fantastic ORI engineering team and trials support team.

The robot used in the trial was Spot, a quadruped robot from Boston Dynamics. The area to explore was a large man-made subterranean structure, made particularly challenging by physical obstacles, narrow corridors, and poor lighting. During the trial we used simulated radioactive hazards in order to ensure the safety of our team.
Decision-Making Under Uncertainty for Safe Exploration and Mapping
SafeEstMDP is applicable to many different robot and hazard types. The other experiment domain in our paper used real-world ocean current data along with a simulated underwater autonomous vehicle. For that setting, the robot has to avoid entering areas that are too shallow, or have strong currents that could push it into shallow areas.

...and the behaviour of the exploration algorithm
The researchers on this project were Matthew Budd, Alex Stephens, Paul Duckworth, Bruno Lacerda, Maurice Fallon and Nick Hawes. Engineering support was provided by Michal Staniaszek and Benoit Casseau. The trials coordinator and videographer was Amber Allen.
Goal-Oriented Long-Lived Systems (GOALS) Lab
For more information, please contact Nick Hawes.



