Toolbox for the design, modelling, and optimisation of soft robots
Soft Robotics Design and Optimization
Soft-bodied robots provide exceptional compliance and adaptability, making them well-suited for applications requiring delicate object handling or adaptability to uncertain environments. However, their flexibility also brings challenges to the design process, including modeling complex deformations and ensuring task-specific functionality. Traditional approaches often rely on trial-and-error or expert intuition, which can be inefficient and resource-intensive. To address these challenges, a systematic and automated design and optimization framework is essential, enabling efficient exploration of design parameters, rapid prototyping, and improved performance in task-oriented applications.
Relevant publications
Yao, L. He and P. Maiolino, "A Simulation-Based Toolbox to Expedite the Digital Design of Bellow Soft Pneumatic Actuators," 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, United Kingdom, 2022, pp. 29-34. (Video)

We developed an open-source simulation toolbox (Github link: https://github.com/ORI-SRL/Bellow_SPA_Toolbox.git) that integrates MATLAB and COMSOL to streamline the design of bellow soft pneumatic actuators (bellow-SPAs). This toolbox combines beam theory for rapid workspace estimation with finite element methods (FEM) for detailed and accurate predictions of deformation, force, and stress behavior. The approach was validated experimentally, offering a robust solution to expedite the design of soft actuators.
Y. Yao, Y. Chen, L. He and P. Maiolino, Design Optimisation for Bellow Soft Pneumatic Actuators in Shape-Matching, 2023 IEEE 6th International Conference on Soft Robotics (RoboSoft), Singapore, 2023.

This work focuses on task-oriented design optimization for soft actuators using both Finite Element Method (FEM) models and data-driven approaches such as artificial neural networks (ANNs). By addressing the trade-offs between speed and accuracy, and the challenges of navigating high-dimensional design spaces, the study compares optimization methods, including Bayesian Optimization (BO) and Genetic Algorithms (GA). Using the shape-matching of a multi-legged soft robot as a case study, the research demonstrates the performance advantages of tailored optimization strategies for different dimensional complexities. The results contribute to scalable and efficient design methodologies for soft robotics.
Y. Yao, L. He, and P. Maiolino, "SPADA: A Toolbox of Designing Soft Pneumatic Actuators for Shape Matching Based on Surrogate Modeling," Robotics Reports, vol. 2, no. 1, pp. 1–14, 2024.
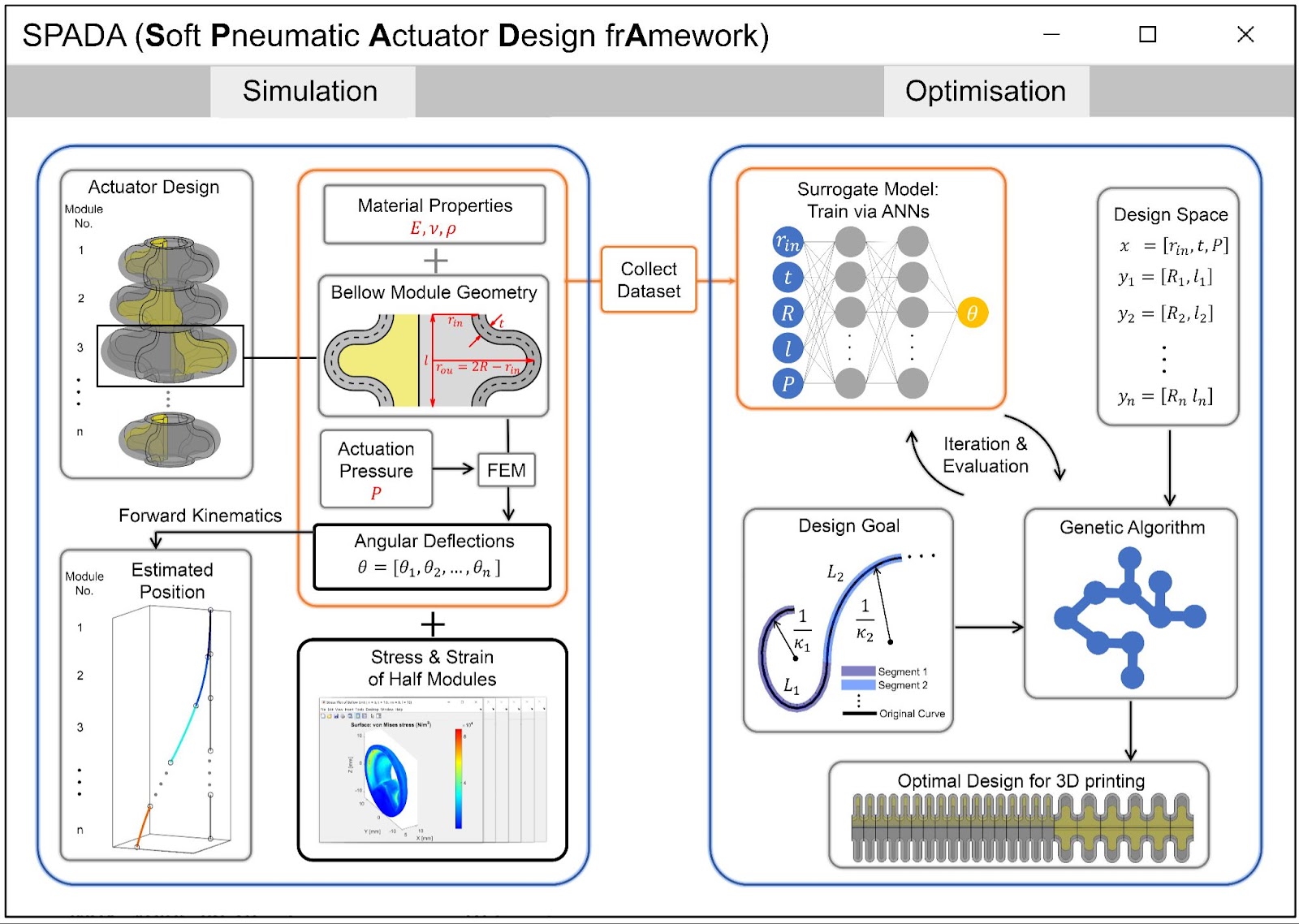
This project introduces SPADA, a user-friendly, open-source toolbox designed to address the challenges of shape-matching in bellow soft pneumatic actuators (GitHub link: https://github.com/ORI-SRL/SPADA.git). SPADA provides an end-to-end solution, combining a modular kinematic model with FEM simulations, surrogate models, and genetic algorithms for optimization. Its intuitive graphical interface makes advanced design tools accessible to researchers and engineers. The framework significantly improves the accuracy and efficiency of actuator design for complex shapes, as demonstrated by its ability to achieve precise 2D and 3D shape-matching with minimal error. By integrating computational modeling with practical design, SPADA advances the field of soft actuator development.